Model Gallery
Explore our StarLeap robot models and prototypes
Our Models

StarLeap Mark I
Advantages:
- Successfully achieved stable and repeatable jumping capability for the robot
Disadvantages:
- Overall weight is excessively high
- Motor torque is insufficient — support legs cannot stably hold the entire machine upright
- Poor mass distribution and counterweight design make it extremely prone to tipping over
- No viable method yet for sustainable, continuous jumping

StarLeap Mark II
Advantages:
- Capable of repeated, continuous jumping
- Achieves high jump height and impressive distance
- Jump angle can be actively adjusted for better control
- Maintains ultra-lightweight design
- Extremely low overall cost
Disadvantages:
- Still carries a notable risk of tipping over after landing
- The mechanism for mineral/prospecting detection remains unsolved and unimplemented
StarLeap Mark III
Advantages:
- Basically achieves stable and repeatable jumping
- Sufficient jump height for effective surface coverage
- Meets core prospecting requirements for basic mineral detection
- Remains sufficiently lightweight
- Extremely low cost
Disadvantages:
- Extremely difficult to recover — once launched, the robot is essentially left permanently on the lunar surface
- Capable of detecting only one or a very limited number of mineral types
Lunar Variant
Specialized version optimized for Moon exploration, with enhanced thermal management and radiation shielding for extended lunar missions.
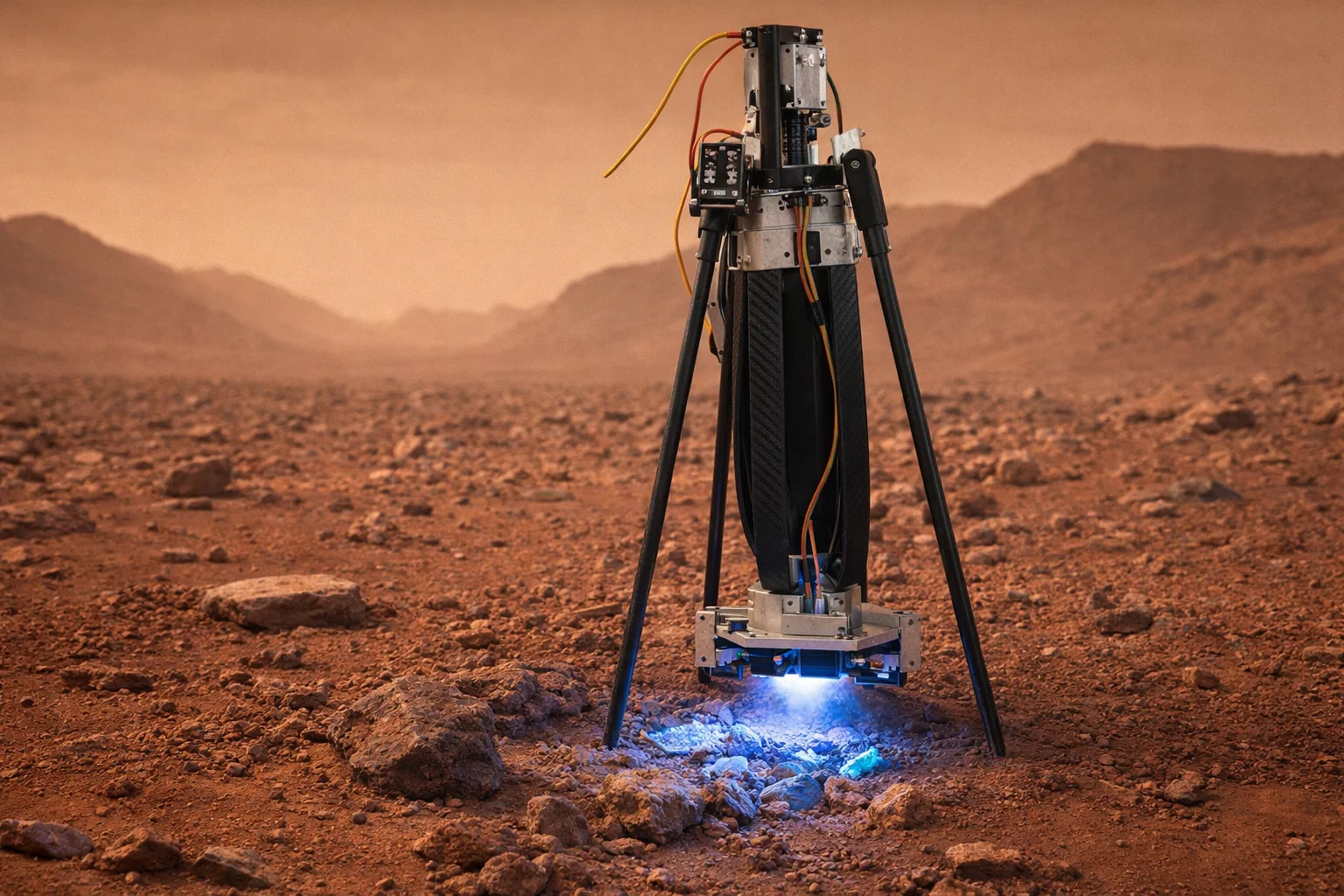
Mars Variant
Mars-optimized model with atmospheric dust protection, enhanced mobility for Martian terrain, and specialized scientific instruments.
Asteroid Explorer
Compact variant designed for asteroid exploration, featuring micro-gravity optimization and sample collection capabilities.